Actuator-level motion and contact episode learning and classification using adaptive resonance theory
IF 4.3
4区 计算机科学
Q3 ROBOTICS
引用次数: 0
Abstract
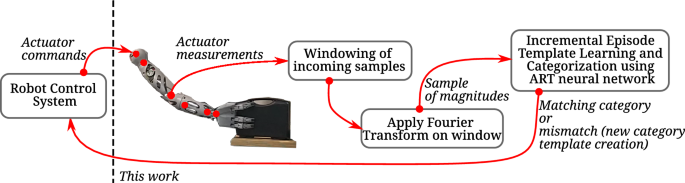
Abstract Several methods exist to detect and distinguish collisions of robotic systems with their environment, since this information is a critical dependency of many tasks. These methods are prevalently based on thresholds in combination with filters, models, or offline trained machine learning models. To improve the adaptation and thereby enable a more autonomous operation of robots in new environments, this work evaluates the applicability of an incremental learning approach. The method addresses online learning and recognition of motion and contact episodes of robotic systems from proprioceptive sensor data using machine learning. The objective is to learn new category templates representing previously encountered situations of the actuators and improve them based on newly gathered similar data. This is achieved using an artificial neural network based on adaptive resonance theory (ART). The input samples from the robot’s actuator measurements are preprocessed into frequency spectra. This enables the ART neural network to learn incrementally recurring episodic patterns from these preprocessed data. An evaluation based on preliminary experimental data from a grasping motion of a humanoid robot’s arm encountering contacts is presented and suggests that this is a promising approach.
基于自适应共振理论的执行器级运动与接触事件学习与分类
由于这些信息是许多任务的关键依赖项,因此存在几种方法来检测和区分机器人系统与其环境的碰撞。这些方法通常基于阈值,结合过滤器、模型或离线训练的机器学习模型。为了提高适应性,从而使机器人在新环境中更加自主地操作,本工作评估了增量学习方法的适用性。该方法利用机器学习解决了在线学习和识别机器人系统的运动和接触事件,这些事件来自本体感觉传感器数据。目标是学习代表执行器先前遇到的情况的新类别模板,并基于新收集的类似数据对其进行改进。这是利用基于自适应共振理论(ART)的人工神经网络实现的。将机器人执行器测量的输入样本预处理成频谱。这使得ART神经网络能够从这些预处理数据中逐步学习反复出现的情景模式。基于初步实验数据的评估,从一个人形机器人的手臂抓取运动遇到接触,并提出了这是一个有前途的方法。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Intelligent Service Robotics
ROBOTICS-
CiteScore
5.70
自引率
4.00%
发文量
46
期刊介绍:
The journal directs special attention to the emerging significance of integrating robotics with information technology and cognitive science (such as ubiquitous and adaptive computing,information integration in a distributed environment, and cognitive modelling for human-robot interaction), which spurs innovation toward a new multi-dimensional robotic service to humans. The journal intends to capture and archive this emerging yet significant advancement in the field of intelligent service robotics. The journal will publish original papers of innovative ideas and concepts, new discoveries and improvements, as well as novel applications and business models which are related to the field of intelligent service robotics described above and are proven to be of high quality. The areas that the Journal will cover include, but are not limited to: Intelligent robots serving humans in daily life or in a hazardous environment, such as home or personal service robots, entertainment robots, education robots, medical robots, healthcare and rehabilitation robots, and rescue robots (Service Robotics); Intelligent robotic functions in the form of embedded systems for applications to, for example, intelligent space, intelligent vehicles and transportation systems, intelligent manufacturing systems, and intelligent medical facilities (Embedded Robotics); The integration of robotics with network technologies, generating such services and solutions as distributed robots, distance robotic education-aides, and virtual laboratories or museums (Networked Robotics).
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


