Linear Quadratic Gaussian Control for a Liquid-Carrying Quadrotor
IF 1.4
4区 工程技术
Q3 ENGINEERING, ELECTRICAL & ELECTRONIC
Iranian Journal of Science and Technology-Transactions of Electrical Engineering
Pub Date : 2023-09-15
DOI:10.1007/s40998-023-00657-y
引用次数: 0
Abstract
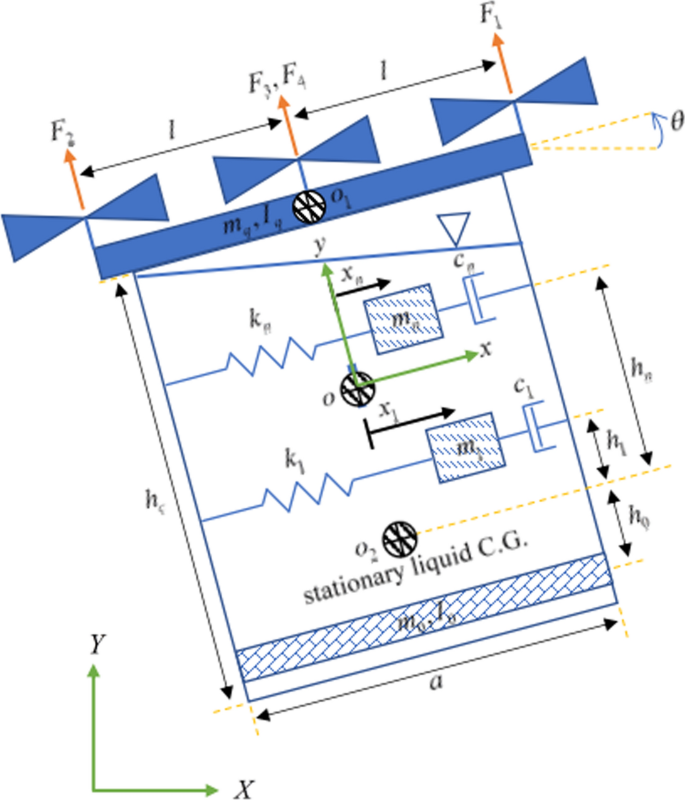
Abstract A quadrotor with a liquid tank may be used in various tasks such as spraying pesticides and firefighting. Therefore, motion of the quadrotor should be controlled such that liquid sloshing is suppressed. To tackle this issue, a LQG controller is proposed in this paper. The LQG controller is based on a linear equivalent mechanical model for liquid sloshing which is presented in this study. The proposed controller uses position and attitude feedback of quadrotor to estimate and control the liquid states. This is different than other controllers presented in the literature where they consider liquid sloshing as an external disturbance. LQG controller is simulated using system’s nonlinear equations and compared to a PID controller. The results depicted a 20% improvement in trajectory tracking performance for LQG controller while using 11% less energy than its PID counterpart. Also the LQG control scheme was able to compensate for a constant external disturbance whereas the PID controller was not able to stabilize the system while the constant disturbance is present.
载液四旋翼飞行器的线性二次高斯控制
带液罐的四旋翼飞行器可用于喷洒农药、灭火等多种任务。因此,应控制四旋翼的运动,使液体晃动受到抑制。为了解决这一问题,本文提出了一种LQG控制器。LQG控制器基于本文提出的液体晃动的线性等效力学模型。该控制器利用四旋翼飞行器的位置和姿态反馈来估计和控制液体状态。这与文献中提出的其他控制器不同,它们将液体晃动视为外部干扰。利用系统的非线性方程对LQG控制器进行仿真,并与PID控制器进行比较。结果表明,LQG控制器的轨迹跟踪性能提高了20%,而能耗比PID控制器低11%。此外,LQG控制方案能够补偿恒定的外部干扰,而PID控制器在恒定干扰存在时无法稳定系统。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Iranian Journal of Science and Technology-Transactions of Electrical Engineering
ENGINEERING, ELECTRICAL & ELECTRONIC-
CiteScore
5.50
自引率
4.20%
发文量
93
审稿时长
>12 weeks
期刊介绍:
Transactions of Electrical Engineering is to foster the growth of scientific research in all branches of electrical engineering and its related grounds and to provide a medium by means of which the fruits of these researches may be brought to the attentionof the world’s scientific communities.
The journal has the focus on the frontier topics in the theoretical, mathematical, numerical, experimental and scientific developments in electrical engineering as well
as applications of established techniques to new domains in various electical engineering disciplines such as:
Bio electric, Bio mechanics, Bio instrument, Microwaves, Wave Propagation, Communication Theory, Channel Estimation, radar & sonar system, Signal Processing, image processing, Artificial Neural Networks, Data Mining and Machine Learning, Fuzzy Logic and Systems, Fuzzy Control, Optimal & Robust ControlNavigation & Estimation Theory, Power Electronics & Drives, Power Generation & Management The editors will welcome papers from all professors and researchers from universities, research centers,
organizations, companies and industries from all over the world in the hope that this will advance the scientific standards of the journal and provide a channel of communication between Iranian Scholars and their colleague in other parts of the world.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


