A BMO ‐based MRPID controller with optimal control of speed in hybrid stepper motor
引用次数: 0
Abstract
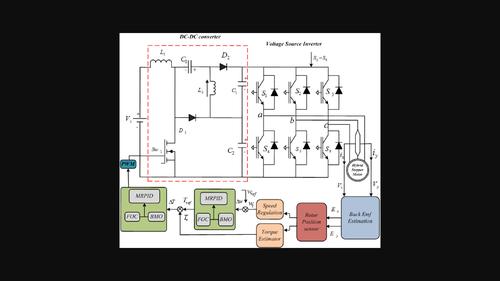
Abstract This paper proposes a Barnacles mating optimizer‐based multi‐resolution proportional‐integral derivative (MRPID) controller for precise speed control of the hybrid stepper motor (HSM). The proposed approach is a barnacle mating optimizer (BMO) control scheme. The main objective of this approach is to use the MRPID controller to improve speed control in particular and uncertain conditions. The BMO is utilized to create the proposed MRPID controller. The proposed converter has a low switching voltage and uses a low input current. The proposed converter supplies a large amount of power to the voltage source inverter (VSI), which converts DC to AC and then supplies it to the HSM. The HSM can be utilized in various settings, including robots and factory applications. Then, the performance of the proposed system has been evaluated in the MATLAB platform and compared with various existing systems. The existing adaptive neuro‐fuzzy inference system (ANFIS) and the moth flame optimization algorithm (MFO) methods are used to validate the efficiency of the proposed controller. The proposed system rise time is 0.0007, the settling time is 0.1, the recovery time is 0.221, the AMU is 1.205, the IAE is 0.1034, and the SSE is 0.234. According to the simulation findings, the suggested system is statistically significant.
基于BMO的混合步进电机速度最优控制MRPID控制器
提出了一种基于Barnacles匹配优化器的多分辨率比例积分导数(MRPID)控制器,用于混合式步进电机(HSM)的精确速度控制。该方法是一种藤壶配对优化(BMO)控制方案。这种方法的主要目的是利用MRPID控制器来改善特定和不确定条件下的速度控制。利用BMO来创建所提出的MRPID控制器。所提出的变换器具有低开关电压和低输入电流。该变换器为电压源逆变器(VSI)提供大量功率,电压源逆变器将直流电转换成交流电,然后将其提供给高速同步电机。高速切削机床可用于各种设置,包括机器人和工厂应用。然后,在MATLAB平台上对系统的性能进行了评估,并与现有的各种系统进行了比较。利用现有的自适应神经模糊推理系统(ANFIS)和蛾焰优化算法(MFO)方法验证了所提控制器的有效性。建议系统上升时间为0.0007,沉降时间为0.1,恢复时间为0.221,AMU为1.205,IAE为0.1034,SSE为0.234。仿真结果表明,该系统具有统计学意义。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


