Urban localization using robust filtering at multiple linearization points
IF 1.9
4区 工程技术
Q3 ENGINEERING, ELECTRICAL & ELECTRONIC
Eurasip Journal on Advances in Signal Processing
Pub Date : 2023-10-06
DOI:10.1186/s13634-023-01062-7
引用次数: 0
Abstract
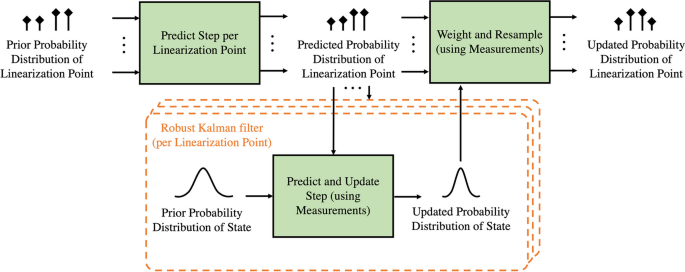
Abstract We propose a robust Bayesian filtering framework for state and multi-modal uncertainty estimation in urban settings by fusing diverse sensor measurements. Our framework addresses multi-modal uncertainty from various error sources by tracking a separate probability distribution for linearization points corresponding to dynamics, measurements, and cost functions. Multiple parallel robust Extended Kalman filters (R-EKF) leverage these linearization points to characterize the state probability distribution. Employing Rao–Blackwellization, we combine the linearization point distribution with the state distribution, resulting in a unified, efficient, and outlier-resistant Bayesian filter that captures multi-modal uncertainty. Furthermore, we introduce a gradient descent-based optimization method to refine the filter parameters using available data. Evaluating our filter on real-world data from a multi-sensor setup comprising camera, Global Navigation Satellite System (GNSS), and Attitude and Heading Reference System (AHRS) demonstrates improved performance in bounding position errors based on uncertainty, while maintaining competitive accuracy and comparable computation to existing methods. Our results suggest that our framework is a promising direction for safe and reliable localization in urban environments.
在多个线性化点上使用鲁棒滤波的城市定位
摘要:本文提出了一种鲁棒贝叶斯滤波框架,通过融合不同的传感器测量值来估计城市环境中的状态和多模态不确定性。我们的框架通过跟踪对应于动力学、测量和成本函数的线性化点的单独概率分布来解决来自各种误差源的多模态不确定性。多个并行鲁棒扩展卡尔曼滤波器(R-EKF)利用这些线性化点来表征状态概率分布。采用rao - blackwell化,我们将线性化点分布与状态分布结合起来,得到了一个统一、高效、抗离群值的贝叶斯滤波器,可以捕获多模态不确定性。此外,我们引入了一种基于梯度下降的优化方法,利用可用数据来优化滤波器参数。在由相机、全球导航卫星系统(GNSS)和姿态和航向参考系统(AHRS)组成的多传感器设置的真实数据上评估我们的滤波器,证明了基于不确定性的边界位置误差的改进性能,同时保持了与现有方法相当的精度和可比较的计算。我们的研究结果表明,我们的框架是在城市环境中安全可靠定位的一个有希望的方向。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Eurasip Journal on Advances in Signal Processing
ENGINEERING, ELECTRICAL & ELECTRONIC-
CiteScore
3.40
自引率
10.50%
发文量
109
审稿时长
3-8 weeks
期刊介绍:
The aim of the EURASIP Journal on Advances in Signal Processing is to highlight the theoretical and practical aspects of signal processing in new and emerging technologies. The journal is directed as much at the practicing engineer as at the academic researcher. Authors of articles with novel contributions to the theory and/or practice of signal processing are welcome to submit their articles for consideration.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


