Distributed adaptive control for multiple unmanned aerial vehicles with state constraints and input quantization
引用次数: 0
Abstract
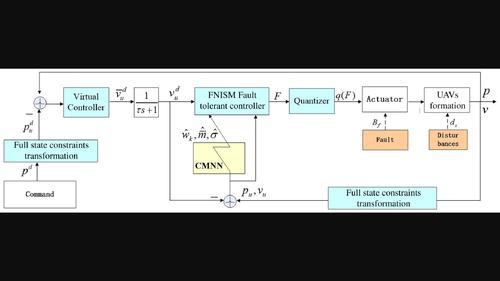
Abstract This paper investigates the distributed fault‐tolerant tracking control (FTTC) problem for multiple unmanned aerial vehicles (UAVs) in the presence of state constraints, input quantization and actuator failures. The unified barrier function (UBF) is first developed to convert the original constrained system model into an unconstrained one, which accomplishes the dynamic constraints of all states. Moreover, a cerebellar model neural network (CMNN) is introduced to estimate the lumped effect of unknown disturbances and actuator failures. Then, a distributed formation flight fault‐tolerant controller (FTC) is designed to guide the UAVs along the desired trajectories based on sliding mode manifold and dynamic surface control technique. Meanwhile, the unknown input chattering and hysteresis quantizer errors in the UAVs system are simultaneously handled by adding the compensation term of FTC. Furthermore, the finite time stability analysis is implemented for all tracking errors and synchronization errors of the cooperative flight control system (CFCS). Finally, a comparative simulation is conducted to demonstrate the effectiveness of the FTTC scheme proposed in this study.
基于状态约束和输入量化的多无人机分布式自适应控制
摘要研究了存在状态约束、输入量化和执行器故障的多架无人机分布式容错跟踪控制(FTTC)问题。首先提出统一屏障函数(UBF),将原有的有约束系统模型转化为无约束系统模型,实现了系统各状态的动态约束。此外,还引入了小脑模型神经网络(CMNN)来估计未知扰动和执行器故障的集总效应。然后,基于滑模流形和动态面控制技术,设计了分布式编队飞行容错控制器(FTC),引导无人机沿期望轨迹飞行。同时,通过加入FTC补偿项,对无人机系统中的未知输入抖振和滞回量化误差进行了同步处理。在此基础上,对协同飞行控制系统的跟踪误差和同步误差进行了有限时间稳定性分析。最后,通过对比仿真验证了本文提出的FTTC方案的有效性。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


