Satoshi Miura, Junichi Takazawa, Yo Kobayashi, Masakatsu G Fujie
{"title":"使用MRCP和SVM辅助重复性促进练习系统的检测时间准确性。","authors":"Satoshi Miura, Junichi Takazawa, Yo Kobayashi, Masakatsu G Fujie","doi":"10.1186/s40638-017-0071-5","DOIUrl":null,"url":null,"abstract":"<p><p>This paper presents a feasibility study of a brain-machine interface system to assist repetitive facilitation exercise. Repetitive facilitation exercise is an effective rehabilitation method for patients with hemiplegia. In repetitive facilitation exercise, a therapist stimulates the paralyzed part of the patient while motor commands run along the nerve pathway. However, successful repetitive facilitation exercise is difficult to achieve and even a skilled practitioner cannot detect when a motor command occurs in patient's brain. We proposed a brain-machine interface system for automatically detecting motor commands and stimulating the paralyzed part of a patient. To determine motor commands from patient electroencephalogram (EEG) data, we measured the movement-related cortical potential (MRCP) and constructed a support vector machine system. In this paper, we validated the prediction timing of the system at the highest accuracy by the system using EEG and MRCP. In the experiments, we measured the EEG when the participant bent their elbow when prompted to do so. We analyzed the EEG data using a cross-validation method. We found that the average accuracy was 72.9% and the highest at the prediction timing 280 ms. We conclude that 280 ms is the most suitable to predict the judgment that a patient intends to exercise or not.</p>","PeriodicalId":90966,"journal":{"name":"Robotics and biomimetics","volume":"4 1","pages":"12"},"PeriodicalIF":0.0000,"publicationDate":"2017-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://sci-hub-pdf.com/10.1186/s40638-017-0071-5","citationCount":"4","resultStr":"{\"title\":\"Accuracy to detection timing for assisting repetitive facilitation exercise system using MRCP and SVM.\",\"authors\":\"Satoshi Miura, Junichi Takazawa, Yo Kobayashi, Masakatsu G Fujie\",\"doi\":\"10.1186/s40638-017-0071-5\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>This paper presents a feasibility study of a brain-machine interface system to assist repetitive facilitation exercise. Repetitive facilitation exercise is an effective rehabilitation method for patients with hemiplegia. In repetitive facilitation exercise, a therapist stimulates the paralyzed part of the patient while motor commands run along the nerve pathway. However, successful repetitive facilitation exercise is difficult to achieve and even a skilled practitioner cannot detect when a motor command occurs in patient's brain. We proposed a brain-machine interface system for automatically detecting motor commands and stimulating the paralyzed part of a patient. To determine motor commands from patient electroencephalogram (EEG) data, we measured the movement-related cortical potential (MRCP) and constructed a support vector machine system. In this paper, we validated the prediction timing of the system at the highest accuracy by the system using EEG and MRCP. In the experiments, we measured the EEG when the participant bent their elbow when prompted to do so. We analyzed the EEG data using a cross-validation method. We found that the average accuracy was 72.9% and the highest at the prediction timing 280 ms. We conclude that 280 ms is the most suitable to predict the judgment that a patient intends to exercise or not.</p>\",\"PeriodicalId\":90966,\"journal\":{\"name\":\"Robotics and biomimetics\",\"volume\":\"4 1\",\"pages\":\"12\"},\"PeriodicalIF\":0.0000,\"publicationDate\":\"2017-01-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://sci-hub-pdf.com/10.1186/s40638-017-0071-5\",\"citationCount\":\"4\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Robotics and biomimetics\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1186/s40638-017-0071-5\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2017/11/7 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Robotics and biomimetics","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1186/s40638-017-0071-5","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2017/11/7 0:00:00","PubModel":"Epub","JCR":"","JCRName":"","Score":null,"Total":0}
Accuracy to detection timing for assisting repetitive facilitation exercise system using MRCP and SVM.
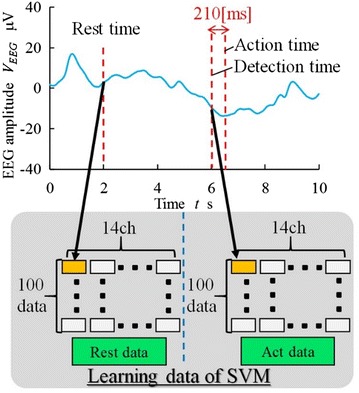
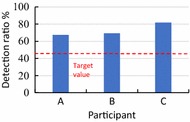
This paper presents a feasibility study of a brain-machine interface system to assist repetitive facilitation exercise. Repetitive facilitation exercise is an effective rehabilitation method for patients with hemiplegia. In repetitive facilitation exercise, a therapist stimulates the paralyzed part of the patient while motor commands run along the nerve pathway. However, successful repetitive facilitation exercise is difficult to achieve and even a skilled practitioner cannot detect when a motor command occurs in patient's brain. We proposed a brain-machine interface system for automatically detecting motor commands and stimulating the paralyzed part of a patient. To determine motor commands from patient electroencephalogram (EEG) data, we measured the movement-related cortical potential (MRCP) and constructed a support vector machine system. In this paper, we validated the prediction timing of the system at the highest accuracy by the system using EEG and MRCP. In the experiments, we measured the EEG when the participant bent their elbow when prompted to do so. We analyzed the EEG data using a cross-validation method. We found that the average accuracy was 72.9% and the highest at the prediction timing 280 ms. We conclude that 280 ms is the most suitable to predict the judgment that a patient intends to exercise or not.


 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


