Cristian Felipe Blanco-Diaz, Cristian David Guerrero-Mendez, Rafhael Milanezi de Andrade, Claudine Badue, Alberto Ferreira De Souza, Denis Delisle-Rodriguez, Teodiano Bastos-Filho
{"title":"利用深度学习方法和脑电图解码蹬车任务中的下肢运动参数。","authors":"Cristian Felipe Blanco-Diaz, Cristian David Guerrero-Mendez, Rafhael Milanezi de Andrade, Claudine Badue, Alberto Ferreira De Souza, Denis Delisle-Rodriguez, Teodiano Bastos-Filho","doi":"10.1007/s11517-024-03147-3","DOIUrl":null,"url":null,"abstract":"<p><p>Stroke is a neurological condition that usually results in the loss of voluntary control of body movements, making it difficult for individuals to perform activities of daily living (ADLs). Brain-computer interfaces (BCIs) integrated into robotic systems, such as motorized mini exercise bikes (MMEBs), have been demonstrated to be suitable for restoring gait-related functions. However, kinematic estimation of continuous motion in BCI systems based on electroencephalography (EEG) remains a challenge for the scientific community. This study proposes a comparative analysis to evaluate two artificial neural network (ANN)-based decoders to estimate three lower-limb kinematic parameters: x- and y-axis position of the ankle and knee joint angle during pedaling tasks. Long short-term memory (LSTM) was used as a recurrent neural network (RNN), which reached Pearson correlation coefficient (PCC) scores close to 0.58 by reconstructing kinematic parameters from the EEG features on the delta band using a time window of 250 ms. These estimates were evaluated through kinematic variance analysis, where our proposed algorithm showed promising results for identifying pedaling and rest periods, which could increase the usability of classification tasks. Additionally, negative linear correlations were found between pedaling speed and decoder performance, thereby indicating that kinematic parameters between slower speeds may be easier to estimate. The results allow concluding that the use of deep learning (DL)-based methods is feasible for the estimation of lower-limb kinematic parameters during pedaling tasks using EEG signals. This study opens new possibilities for implementing controllers most robust for MMEBs and BCIs based on continuous decoding, which may allow for maximizing the degrees of freedom and personalized rehabilitation.</p>","PeriodicalId":49840,"journal":{"name":"Medical & Biological Engineering & Computing","volume":" ","pages":"3763-3779"},"PeriodicalIF":2.6000,"publicationDate":"2024-12-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Decoding lower-limb kinematic parameters during pedaling tasks using deep learning approaches and EEG.\",\"authors\":\"Cristian Felipe Blanco-Diaz, Cristian David Guerrero-Mendez, Rafhael Milanezi de Andrade, Claudine Badue, Alberto Ferreira De Souza, Denis Delisle-Rodriguez, Teodiano Bastos-Filho\",\"doi\":\"10.1007/s11517-024-03147-3\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Stroke is a neurological condition that usually results in the loss of voluntary control of body movements, making it difficult for individuals to perform activities of daily living (ADLs). Brain-computer interfaces (BCIs) integrated into robotic systems, such as motorized mini exercise bikes (MMEBs), have been demonstrated to be suitable for restoring gait-related functions. However, kinematic estimation of continuous motion in BCI systems based on electroencephalography (EEG) remains a challenge for the scientific community. This study proposes a comparative analysis to evaluate two artificial neural network (ANN)-based decoders to estimate three lower-limb kinematic parameters: x- and y-axis position of the ankle and knee joint angle during pedaling tasks. Long short-term memory (LSTM) was used as a recurrent neural network (RNN), which reached Pearson correlation coefficient (PCC) scores close to 0.58 by reconstructing kinematic parameters from the EEG features on the delta band using a time window of 250 ms. These estimates were evaluated through kinematic variance analysis, where our proposed algorithm showed promising results for identifying pedaling and rest periods, which could increase the usability of classification tasks. Additionally, negative linear correlations were found between pedaling speed and decoder performance, thereby indicating that kinematic parameters between slower speeds may be easier to estimate. The results allow concluding that the use of deep learning (DL)-based methods is feasible for the estimation of lower-limb kinematic parameters during pedaling tasks using EEG signals. This study opens new possibilities for implementing controllers most robust for MMEBs and BCIs based on continuous decoding, which may allow for maximizing the degrees of freedom and personalized rehabilitation.</p>\",\"PeriodicalId\":49840,\"journal\":{\"name\":\"Medical & Biological Engineering & Computing\",\"volume\":\" \",\"pages\":\"3763-3779\"},\"PeriodicalIF\":2.6000,\"publicationDate\":\"2024-12-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Medical & Biological Engineering & Computing\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1007/s11517-024-03147-3\",\"RegionNum\":4,\"RegionCategory\":\"医学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2024/7/19 0:00:00\",\"PubModel\":\"Epub\",\"JCR\":\"Q2\",\"JCRName\":\"COMPUTER SCIENCE, INTERDISCIPLINARY APPLICATIONS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Medical & Biological Engineering & Computing","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1007/s11517-024-03147-3","RegionNum":4,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2024/7/19 0:00:00","PubModel":"Epub","JCR":"Q2","JCRName":"COMPUTER SCIENCE, INTERDISCIPLINARY APPLICATIONS","Score":null,"Total":0}
引用次数: 0
摘要
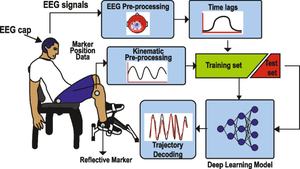
脑卒中是一种神经系统疾病,通常会导致患者丧失对身体运动的自主控制,使其难以完成日常生活活动(ADL)。将脑机接口(BCI)集成到电动迷你健身车(MMEB)等机器人系统中,已被证明适用于恢复步态相关功能。然而,在基于脑电图(EEG)的 BCI 系统中,连续运动的运动学估计仍然是科学界面临的一项挑战。本研究通过比较分析评估了两种基于人工神经网络(ANN)的解码器,以估计三个下肢运动学参数:踝关节的 x 轴和 y 轴位置以及蹬车任务中的膝关节角度。长短期记忆(LSTM)被用作递归神经网络(RNN),通过使用 250 毫秒的时间窗口从δ波段上的脑电图特征重建运动学参数,其皮尔逊相关系数(PCC)得分接近 0.58。通过运动学方差分析对这些估计值进行了评估,我们提出的算法在识别蹬踏和休息时间方面显示出良好的效果,这可以提高分类任务的可用性。此外,我们还发现蹬踏速度和解码器性能之间存在负线性相关,这表明速度较慢的运动参数可能更容易估算。根据这些结果可以得出结论,使用基于深度学习(DL)的方法,在利用脑电信号进行蹬踏任务时估算下肢运动参数是可行的。这项研究为在连续解码的基础上为 MMEBs 和 BCIs 实施最稳健的控制器提供了新的可能性,从而最大限度地提高自由度和实现个性化康复。
Decoding lower-limb kinematic parameters during pedaling tasks using deep learning approaches and EEG.
Stroke is a neurological condition that usually results in the loss of voluntary control of body movements, making it difficult for individuals to perform activities of daily living (ADLs). Brain-computer interfaces (BCIs) integrated into robotic systems, such as motorized mini exercise bikes (MMEBs), have been demonstrated to be suitable for restoring gait-related functions. However, kinematic estimation of continuous motion in BCI systems based on electroencephalography (EEG) remains a challenge for the scientific community. This study proposes a comparative analysis to evaluate two artificial neural network (ANN)-based decoders to estimate three lower-limb kinematic parameters: x- and y-axis position of the ankle and knee joint angle during pedaling tasks. Long short-term memory (LSTM) was used as a recurrent neural network (RNN), which reached Pearson correlation coefficient (PCC) scores close to 0.58 by reconstructing kinematic parameters from the EEG features on the delta band using a time window of 250 ms. These estimates were evaluated through kinematic variance analysis, where our proposed algorithm showed promising results for identifying pedaling and rest periods, which could increase the usability of classification tasks. Additionally, negative linear correlations were found between pedaling speed and decoder performance, thereby indicating that kinematic parameters between slower speeds may be easier to estimate. The results allow concluding that the use of deep learning (DL)-based methods is feasible for the estimation of lower-limb kinematic parameters during pedaling tasks using EEG signals. This study opens new possibilities for implementing controllers most robust for MMEBs and BCIs based on continuous decoding, which may allow for maximizing the degrees of freedom and personalized rehabilitation.
期刊介绍:
Founded in 1963, Medical & Biological Engineering & Computing (MBEC) continues to serve the biomedical engineering community, covering the entire spectrum of biomedical and clinical engineering. The journal presents exciting and vital experimental and theoretical developments in biomedical science and technology, and reports on advances in computer-based methodologies in these multidisciplinary subjects. The journal also incorporates new and evolving technologies including cellular engineering and molecular imaging.
MBEC publishes original research articles as well as reviews and technical notes. Its Rapid Communications category focuses on material of immediate value to the readership, while the Controversies section provides a forum to exchange views on selected issues, stimulating a vigorous and informed debate in this exciting and high profile field.
MBEC is an official journal of the International Federation of Medical and Biological Engineering (IFMBE).

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


