{"title":"提高软指承重能力和抓握稳定性的生物启发互钩策略","authors":"Jie Huang, Lingjie Gai, Xiaofeng Zong, Yunquan Li","doi":"10.1007/s42235-024-00492-9","DOIUrl":null,"url":null,"abstract":"<div><p>Soft grippers have great potential applications in daily life, since they can compliantly grasp soft and delicate objects. However, the highly elastic fingers of most soft grippers are prone to separate from each other while grasping objects due to their low stiffness, thus reducing the grasping stability and load-bearing capacity. To tackle this problem, inspired from the venus flytrap plant, this work proposes a mutual-hook mechanism to restrain the separation and improve the grasping performance of soft fingers. The novel soft gripper design consists of three modules, a soft finger-cot, two Soft Hook Actuators(SHAs) and two sliding mechanisms. Here, the soft finger-cot covers on the soft finger, increasing the contact area with the target object, two SHAs are fixed to the left and right sides of the finger-cot, and the sliding mechanisms are designed to make SHAs stretch flexibly. Experiments demonstrate that the proposed design can restrain the separation of soft fingers substantially, and the soft fingers with the finger-cots can grasp objects three times heavier than the soft fingers without the proposed design. The proposed design can provide invaluable insights for soft fingers to restrain the separation while grasping, thus improving the grasping stability and the load-bearing capacity.</p></div>","PeriodicalId":614,"journal":{"name":"Journal of Bionic Engineering","volume":"21 3","pages":"1290 - 1304"},"PeriodicalIF":4.9000,"publicationDate":"2024-03-20","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"A Bio-inspired Mutual-hook Strategy for the Soft Finger to Improve Load-bearing Capacity and Grasping Stability\",\"authors\":\"Jie Huang, Lingjie Gai, Xiaofeng Zong, Yunquan Li\",\"doi\":\"10.1007/s42235-024-00492-9\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Soft grippers have great potential applications in daily life, since they can compliantly grasp soft and delicate objects. However, the highly elastic fingers of most soft grippers are prone to separate from each other while grasping objects due to their low stiffness, thus reducing the grasping stability and load-bearing capacity. To tackle this problem, inspired from the venus flytrap plant, this work proposes a mutual-hook mechanism to restrain the separation and improve the grasping performance of soft fingers. The novel soft gripper design consists of three modules, a soft finger-cot, two Soft Hook Actuators(SHAs) and two sliding mechanisms. Here, the soft finger-cot covers on the soft finger, increasing the contact area with the target object, two SHAs are fixed to the left and right sides of the finger-cot, and the sliding mechanisms are designed to make SHAs stretch flexibly. Experiments demonstrate that the proposed design can restrain the separation of soft fingers substantially, and the soft fingers with the finger-cots can grasp objects three times heavier than the soft fingers without the proposed design. The proposed design can provide invaluable insights for soft fingers to restrain the separation while grasping, thus improving the grasping stability and the load-bearing capacity.</p></div>\",\"PeriodicalId\":614,\"journal\":{\"name\":\"Journal of Bionic Engineering\",\"volume\":\"21 3\",\"pages\":\"1290 - 1304\"},\"PeriodicalIF\":4.9000,\"publicationDate\":\"2024-03-20\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Journal of Bionic Engineering\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://link.springer.com/article/10.1007/s42235-024-00492-9\",\"RegionNum\":3,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ENGINEERING, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Bionic Engineering","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s42235-024-00492-9","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, MULTIDISCIPLINARY","Score":null,"Total":0}
A Bio-inspired Mutual-hook Strategy for the Soft Finger to Improve Load-bearing Capacity and Grasping Stability
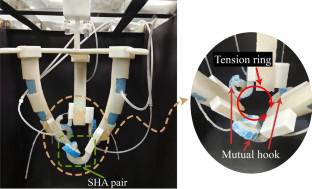
Soft grippers have great potential applications in daily life, since they can compliantly grasp soft and delicate objects. However, the highly elastic fingers of most soft grippers are prone to separate from each other while grasping objects due to their low stiffness, thus reducing the grasping stability and load-bearing capacity. To tackle this problem, inspired from the venus flytrap plant, this work proposes a mutual-hook mechanism to restrain the separation and improve the grasping performance of soft fingers. The novel soft gripper design consists of three modules, a soft finger-cot, two Soft Hook Actuators(SHAs) and two sliding mechanisms. Here, the soft finger-cot covers on the soft finger, increasing the contact area with the target object, two SHAs are fixed to the left and right sides of the finger-cot, and the sliding mechanisms are designed to make SHAs stretch flexibly. Experiments demonstrate that the proposed design can restrain the separation of soft fingers substantially, and the soft fingers with the finger-cots can grasp objects three times heavier than the soft fingers without the proposed design. The proposed design can provide invaluable insights for soft fingers to restrain the separation while grasping, thus improving the grasping stability and the load-bearing capacity.
期刊介绍:
The Journal of Bionic Engineering (JBE) is a peer-reviewed journal that publishes original research papers and reviews that apply the knowledge learned from nature and biological systems to solve concrete engineering problems. The topics that JBE covers include but are not limited to:
Mechanisms, kinematical mechanics and control of animal locomotion, development of mobile robots with walking (running and crawling), swimming or flying abilities inspired by animal locomotion.
Structures, morphologies, composition and physical properties of natural and biomaterials; fabrication of new materials mimicking the properties and functions of natural and biomaterials.
Biomedical materials, artificial organs and tissue engineering for medical applications; rehabilitation equipment and devices.
Development of bioinspired computation methods and artificial intelligence for engineering applications.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


