{"title":"The hybrid bio-robotic swarm as a powerful tool for collective motion research: a perspective.","authors":"Amir Ayali, Gal A Kaminka","doi":"10.3389/fnbot.2023.1215085","DOIUrl":null,"url":null,"abstract":"<p><p>Swarming or collective motion is ubiquitous in natural systems, and instrumental in many technological applications. Accordingly, research interest in this phenomenon is crossing discipline boundaries. A common major question is that of the intricate interactions between the individual, the group, and the environment. There are, however, major gaps in our understanding of swarming systems, very often due to the theoretical difficulty of relating embodied properties to the physical agents-individual animals or robots. Recently, there has been much progress in exploiting the complementary nature of the two disciplines: biology and robotics. This, unfortunately, is still uncommon in swarm research. Specifically, there are very few examples of joint research programs that investigate multiple biological and synthetic agents concomitantly. Here we present a novel research tool, enabling a unique, tightly integrated, bio-inspired, and robot-assisted study of major questions in swarm collective motion. Utilizing a quintessential model of collective behavior-locust nymphs and our recently developed Nymbots (locust-inspired robots)-we focus on fundamental questions and gaps in the scientific understanding of swarms, providing novel interdisciplinary insights and sharing ideas disciplines. The Nymbot-Locust bio-hybrid swarm enables the investigation of biology hypotheses that would be otherwise difficult, or even impossible to test, and to discover technological insights that might otherwise remain hidden from view.</p>","PeriodicalId":12628,"journal":{"name":"Frontiers in Neurorobotics","volume":"17 ","pages":"1215085"},"PeriodicalIF":2.6000,"publicationDate":"2023-07-14","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10375296/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Neurorobotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.3389/fnbot.2023.1215085","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2023/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
引用次数: 0
Abstract
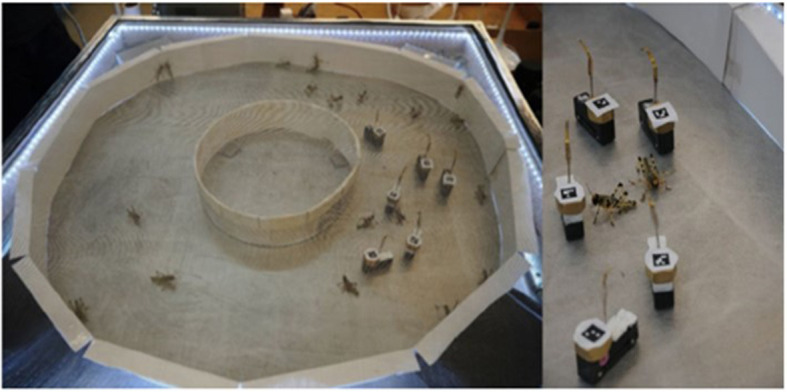
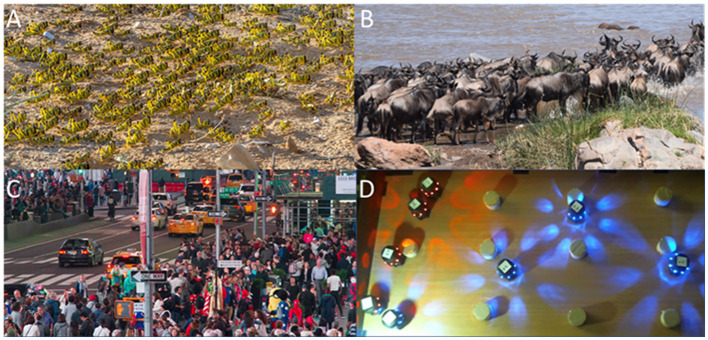
Swarming or collective motion is ubiquitous in natural systems, and instrumental in many technological applications. Accordingly, research interest in this phenomenon is crossing discipline boundaries. A common major question is that of the intricate interactions between the individual, the group, and the environment. There are, however, major gaps in our understanding of swarming systems, very often due to the theoretical difficulty of relating embodied properties to the physical agents-individual animals or robots. Recently, there has been much progress in exploiting the complementary nature of the two disciplines: biology and robotics. This, unfortunately, is still uncommon in swarm research. Specifically, there are very few examples of joint research programs that investigate multiple biological and synthetic agents concomitantly. Here we present a novel research tool, enabling a unique, tightly integrated, bio-inspired, and robot-assisted study of major questions in swarm collective motion. Utilizing a quintessential model of collective behavior-locust nymphs and our recently developed Nymbots (locust-inspired robots)-we focus on fundamental questions and gaps in the scientific understanding of swarms, providing novel interdisciplinary insights and sharing ideas disciplines. The Nymbot-Locust bio-hybrid swarm enables the investigation of biology hypotheses that would be otherwise difficult, or even impossible to test, and to discover technological insights that might otherwise remain hidden from view.
期刊介绍:
Frontiers in Neurorobotics publishes rigorously peer-reviewed research in the science and technology of embodied autonomous neural systems. Specialty Chief Editors Alois C. Knoll and Florian Röhrbein at the Technische Universität München are supported by an outstanding Editorial Board of international experts. This multidisciplinary open-access journal is at the forefront of disseminating and communicating scientific knowledge and impactful discoveries to researchers, academics and the public worldwide.
Neural systems include brain-inspired algorithms (e.g. connectionist networks), computational models of biological neural networks (e.g. artificial spiking neural nets, large-scale simulations of neural microcircuits) and actual biological systems (e.g. in vivo and in vitro neural nets). The focus of the journal is the embodiment of such neural systems in artificial software and hardware devices, machines, robots or any other form of physical actuation. This also includes prosthetic devices, brain machine interfaces, wearable systems, micro-machines, furniture, home appliances, as well as systems for managing micro and macro infrastructures. Frontiers in Neurorobotics also aims to publish radically new tools and methods to study plasticity and development of autonomous self-learning systems that are capable of acquiring knowledge in an open-ended manner. Models complemented with experimental studies revealing self-organizing principles of embodied neural systems are welcome. Our journal also publishes on the micro and macro engineering and mechatronics of robotic devices driven by neural systems, as well as studies on the impact that such systems will have on our daily life.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


