Implementation of a Constant Speed Mode for Control of a Manipulator with a Remote Center of Rotation
IF 0.4
Q4 ENGINEERING, MECHANICAL
Journal of Machinery Manufacture and Reliability
Pub Date : 2024-09-26
DOI:10.1134/S1052618824700912
引用次数: 0
Abstract
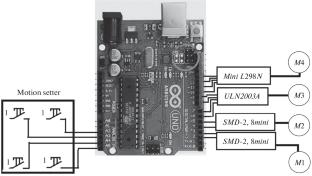
The problems of manual control of a manipulator using motion controllers with a logical output signal are considered. Controllers of various designs and logic of action are considered. Various control modes and principles are highlighted that allow the simultaneous operation of several drives using the example of a mechanism with four degrees of freedom and a remote center of rotation. Recommendations are given for choosing control methods and laws when developing spatial manipulators.
实现恒速模式以控制具有远程旋转中心的机械手
本论文探讨了使用具有逻辑输出信号的运动控制器对机械手进行手动控制的问题。考虑了各种设计和动作逻辑的控制器。以一个具有四个自由度和一个远程旋转中心的机械装置为例,重点介绍了允许多个驱动装置同时运行的各种控制模式和原理。对开发空间机械手时选择控制方法和规律提出了建议。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Journal of Machinery Manufacture and Reliability
ENGINEERING, MECHANICAL-
CiteScore
0.80
自引率
33.30%
发文量
61
期刊介绍:
Journal of Machinery Manufacture and Reliability is devoted to advances in machine design; CAD/CAM; experimental mechanics of machines, machine life expectancy, and reliability studies; machine dynamics and kinematics; vibration, acoustics, and stress/strain; wear resistance engineering; real-time machine operation diagnostics; robotic systems; new materials and manufacturing processes, and other topics.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


