{"title":"Design and Gait Planning of a Worm-inspired Metameric Robot for Pipe Crawling","authors":"Yu Liu, Qingbiao Shi, Zhen Chen","doi":"10.1007/s42235-024-00497-4","DOIUrl":null,"url":null,"abstract":"<div><p>The earthworm has been attracted much attention in the research and development of biomimetic robots due to their unique locomotion mechanism, compact structure, and small motion space. This paper presents a new design and prototype of a worm-inspired metameric robot with a movement pattern similar to that of earthworms. The robot consists of multiple telescopic modules connected in series through joint modules. The telescopic module mimics the contraction and elongation motion modes of the earthworm segments. A kinematic and dynamic analysis is conducted on the telescopic module, and an input torque calculation method is provided to ensure sufficient friction between the robot and the pipe wall. The gait modes of the prototype robot for straight and turning locomotion are introduced, and these modes are extended to robots constructed by different numbers of telescopic modules. In addition, a method is proposed to increase the friction between the robot and the pipe wall in the aforementioned gait modes without changing the robot structure, thereby improving the robot’s motion ability in pipelines. The theoretical model of gait modes has also been validated through gait experiments. The findings of this paper would provide a useful basis for the design, modeling, and control of future worm inspired robots.</p></div>","PeriodicalId":614,"journal":{"name":"Journal of Bionic Engineering","volume":"21 3","pages":"1265 - 1277"},"PeriodicalIF":4.9000,"publicationDate":"2024-03-27","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Bionic Engineering","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s42235-024-00497-4","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
Abstract
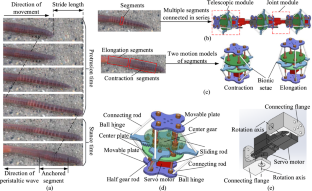
The earthworm has been attracted much attention in the research and development of biomimetic robots due to their unique locomotion mechanism, compact structure, and small motion space. This paper presents a new design and prototype of a worm-inspired metameric robot with a movement pattern similar to that of earthworms. The robot consists of multiple telescopic modules connected in series through joint modules. The telescopic module mimics the contraction and elongation motion modes of the earthworm segments. A kinematic and dynamic analysis is conducted on the telescopic module, and an input torque calculation method is provided to ensure sufficient friction between the robot and the pipe wall. The gait modes of the prototype robot for straight and turning locomotion are introduced, and these modes are extended to robots constructed by different numbers of telescopic modules. In addition, a method is proposed to increase the friction between the robot and the pipe wall in the aforementioned gait modes without changing the robot structure, thereby improving the robot’s motion ability in pipelines. The theoretical model of gait modes has also been validated through gait experiments. The findings of this paper would provide a useful basis for the design, modeling, and control of future worm inspired robots.
期刊介绍:
The Journal of Bionic Engineering (JBE) is a peer-reviewed journal that publishes original research papers and reviews that apply the knowledge learned from nature and biological systems to solve concrete engineering problems. The topics that JBE covers include but are not limited to:
Mechanisms, kinematical mechanics and control of animal locomotion, development of mobile robots with walking (running and crawling), swimming or flying abilities inspired by animal locomotion.
Structures, morphologies, composition and physical properties of natural and biomaterials; fabrication of new materials mimicking the properties and functions of natural and biomaterials.
Biomedical materials, artificial organs and tissue engineering for medical applications; rehabilitation equipment and devices.
Development of bioinspired computation methods and artificial intelligence for engineering applications.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


